











地址:北京市海淀区清河安宁庄后街12号院1号楼一层、安宁庄东路18号光华创业园16号楼四层 电话:4008113950 ; 4008113680 后台管理 CRM
技术支持:兴旺宝明通
类 型:
车辆测试系统描 述:
基于GPS定位的道路交通环境与车辆数据采集系统是一种功能强大的仪器。它是基于新一代的高性能卫星接收器,其中主机主要用于测量汽车移动时的速度和距离,并且能够提供横纵向加速度值,减速度,时间和制动、滑行、加速等距离的准确测量。)
)
)
基于GPS定位的道路交通环境与车辆数据采集系统是一种功能强大的仪器。它是基于新一代的高性能卫星接收器,其中主机主要用于测量汽车移动时的速度和距离,并且能够提供横纵向加速度值,减速度,时间和制动、滑行、加速等距离的准确测量。外接各种模块和传感器可以采集油耗,温度,加速度,角速度及角度,转向角速度及角度,转向力矩,制动踏板力,制动踏板位移,制动风管压力,车辆CAN接口信息等其它许多数据。由于它的体积较小及安装简便,其非常适合汽车综合测试时的使用。由于系统本身带有标准的模拟及数字模式的CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。

全套测量系统体积极小,安装简便迅速
能完成国家标准要求的汽车动力性,经济性,操纵稳定性,制动性能等实验
制动触发形式多样,使试验更加方便
高精度、高可靠性,高耐振、抗冲击性能确保测试质量
大容量紧凑式闪存卡(CF卡)即时存储数据,以便事后处理
可扩展连接其他各种传感器等
在线显示4个测量参数
各种测量或采集到的参数可以实时显示
可根据要求设定各种不同的试验条件进行试验
制动触发形式多样,使试验更加方便
WINDOWS操作界面的设定和分析软件,使用方便
高精度、高可靠性,高耐振、抗冲击性能确保测试质量
用GPS非接触式速度和距离测量
现场即时打印功能,打印各个测量或采集到的参数,实现现场数据阅读
大容量紧凑式闪存卡(CF卡)即时存储数据,以便后处理
可扩展连接其他各种传感器
绘制轨迹图,圈数定时

能以标准的形式测量下列参数
速度、距离、时间、位置、方向、高度、横向加速度、纵向加速度、垂直速度、与中心线的漂移、转弯半径
用其它的硬件可测量的参数包括
外部数字触发、温度、模拟电压、CAN 总线信息、偏航率、滚动角、倾斜角、滑行角度
量程及精度
|
序号 |
测量参数 |
量程 |
精度 |
|
1 |
距离 |
-- |
0.05% |
|
2 |
速度 |
0-1600公里/小时 |
0.1公里/小时 |
|
3 |
时间 |
-- |
0.001秒 |
|
4 |
燃油消耗(实时显示) |
0.3-120升/小时 |
±0.2% |
|
5 |
X,Y,Z三轴向加速度 |
±1.7g |
1mg |
|
6 |
角速度(侧倾,俯仰,横摆) |
±150°/s |
0.1°/s |
|
7 |
转向力矩 |
± 50Nm |
±0.5Nm |
|
8 |
转向角 |
±1250° |
满刻度时0.1° |
|
9 |
温度 |
—— |
—— |
|
10 |
制动踏板力传感器(带实时显示器) |
0-1500N |
0.5% |
|
11 |
制动踏板行程 |
0 - 300 mm |
0.1 mm |
|
12 |
制动管路压力 |
0-200 Bar |
0.25% |
|
13 |
发动机转速 |
0-10000转/分钟 |
±1转/分钟 |
滑行试验
油耗试验
爬陡坡试验
最高车速试验
加速性能试验
制动性能试验
操纵稳定性试验
最小稳定车速试验
最小转弯直径测量实验
制动踏板力测量实验
制动踏板行程测量实验
制动管路压力测量实验
汽车防抱制动系统性能实验
温度测量实验
里程,速度表校验等其它试验
oGB/T 12545 - 1990 汽车燃料消耗量
oGB/T 12547 - 1990 最低稳定车速
oGB/T 12536 - 1990 汽车滑行试验
oGB/T 12543 - 1990 汽车加速性能
oGB/T 12539 - 1990 汽车爬坡性能
oGB/T 12544 - 1990 汽车最高车速
oGB/T 12676 - 1999 汽车制动系统性能
oGB/T 6323 - 94 汽车操纵稳定性试验方法
oGB/T 12540 - 90 汽车最小转弯直径测定方法
oGB/T 13594 - 92 汽车防抱制动系统性能要求和试验方法
GPS
采用功能强大的全新的GPS引擎,可以提供以20-100Hz的更新率更新所有GPS参数包括速度,角度和位置,速度和角度是通过对GPS载波信号进行多普勒转换进行计算以提供高精度。
模拟量输出
2 x 16位模拟量输出可以通过用户配置输出速度或者其他GPS参数,用户用户其他的数据采集设备,输出电压范围为0到5V直流,分辨率为76 μV 每位。
数字量输出
有两类数字量输出,一个频率/脉冲输出对应于速度,第二个输出显示当前的数据采集状态。速度脉冲输出用户定义,可以改变每米的脉冲数,以仿效大部分其它类型的速度传感器。
数字量输入
两个数字输入,第一个用于制动触发器或事件测定并且连接到一个16位的事件定时器,可以使制动触发器时间的校准精度达到12μs。 第二个数字输入用于采用手持开关控制的遥控速度采集控制。
CAN 总线
两个单独的CAN总线接口,可以从外部模块接受数据,例如温度模块或频率模块,同时可以将GPS CAN数据传输到另外一个总线上。还可以从另外一个CAN总线源(例如车载CAN总线)中记录8个CAN信号。当需要从另外总线中记录数据的时候,可以从工业标准CAN数据库文件(.DBC)中下载数据。
RS232 串行接口
RS232 接口用于配置和输出GPS实时数据。必须要注意的是如果系统以高于20Hz的速度存储数据到CF卡中时,由于电脑串行口带宽只能到20Hz,以实时传输到软件中串行数据受到限制。这样要获得最好的精度,所有20Hz以上的测试必须在离线模式下对CF卡中的数据进行分析。
CF卡
接受1型的CF卡用于记录数据,数据以标准PC格式存储,允许快速的通过读卡器进行数据传输。文件格式位ASCII 文本格式,可以直接载入到VBOX.EXE软件中或者导入Excel和其它第三方软件中。
产品简介
研究型汽车驾驶模拟器是一款定位于高校和科研机构开展交通安全和驾驶行为相关研究的专业产品。研究型汽车驾驶模拟器不仅提供逼真道路交通仿真场景、真实感驾驶模拟座舱,还提供更为精确的驾驶操纵传感器输出,以及满足研究所需的交通场景编辑系统、驾驶员视线分析系统、驾驶员生理测量系统、驾驶员运动捕捉动作分析系统、驾驶行为分析系统等;具备定制和升级能力,能满足多种道路交通和驾驶行为相关研究的实际科研需求。


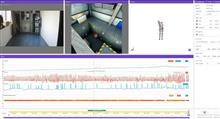
驾驶行为分析功能
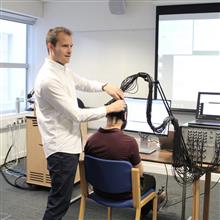
模拟器各传感器的输出参数与驾驶操作视频之间,以及仿真系统场景之间具备同步功能。仿真系统虚拟场景中的事件、驾驶人操作传感器的时刻、操作量,以及驾驶人动作视频之间通过特定的控制协议实现高精度同步,便于开展驾驶行为特性研究;专业开发驾驶人行为分析系统不仅能回放驾驶人全过程的驾驶过程的视频,还能同步将其操作状态(如转向、制动、变道等)配合视频进行输出;同时,配合配套的采集设备,还能准确回放在这些操作状态前后,驾驶人的生理、心理状态参数(如眼动、心率、血压、皮电、呼吸等)的变化值。
高精度传感器
特有的传感器模块采用高精度传感器采集驾驶人的操控信息,包括方向盘转角、方向盘扭矩、制动踏板行程、制动踏板加速度、油门踏板行程、油门踏板加速度,并可根据客户要求指定加装特别精度或样式的传感器
实车驾驶模拟座舱
驾驶模拟座舱采用实车仪表台、座椅等操控部件,驾乘感受真实。方向盘采用ASWS主动转向轮系统模拟驾驶过程中方向盘的回正力矩,助力转向等操作手感;油门踏板、制动踏板、离合踏板安装布置均参照同车型的参数进行安装,力求人机界面的高度和谐统一与自然。
逼真驾驶操纵感受
研究型驾驶模拟器采用多自由度汽车行驶动力学模型,精确解算每一时刻车辆的运动姿态。动力学解算部分采用模块化设计,可根据用户的实际需求,提供3自由度、11自由度、17自由度动力学解算功能,为汽车驾驶模拟的操纵感受提供技术保证;如有需要,可配合参数输出模块,提供定制化动力学参数输出到外部网络、文件或数据库。

驾驶模拟器
驾驶模拟标准模型 UC-win/Road
| 配合驾驶模拟器制作了下述4中典型的VR模型数据。典型路段数据均 基于中国实际的道路建模,是可以辅助驾驶模拟器有效应用的实时VR模型。数据提供场景功能,环境切换功能,车辆运动模型切换等丰富的驾驶行驶环境。 |  |
■城市道路数据
基于北京市三环线为中心对首都特有的城市道路网进行了再现。对权限道路标识,标线(对应中国GB5768-2009规范)和向岛牌基于实地取材进行建模和 配置,对具有北京特色宽敞的道路路幅,苜蓿也行立交等数十处立交桥进行了制作,沿线的道路设施,建筑物进行了重视再现。加上包括08年奥运场馆的「鸟巢」 等地标性建筑物的配置,真实地烘托出了北京城市环线所特有的空间感。
 |
 |
 |
 |
■高速道路VR数据
国道G110的扩宽业务为北京的实际数据模型。以往双向2车道的一般国道扩建为分离式路基的双向4车 道道路,运用 UC-win/Road基于建设中的设计图纸进行了数据制作。真实再现了施工期间大型卡车的交通流特征,并在场景功能中加入雨,学,冰冻路面等特殊气象。 此外,对于本系统可替换卡车客舱值特点,数据制作过程中照顾了适宜的驾驶空间,重视再现了车辆和驾驶员的感觉。
 |
 |
 |
 |
■山岳道路VR数据
对国道G109的部分区间进行再现的VR数据,为了让驾驶员真实感受到车辆在不同转弯半径上通过时驾 驶模拟器带来的加速度感及离心力,对道路结构进行了忠实再现。参考实地拍摄的视频对连续弯道进行了制作,包括道路的横截面,侧沟,排水路,边坡材质等均参 考实地拍摄的照片素材进行了再现。
 |
 |
 |
 |
■无限循环道路数据
以疲劳驾驶研究为目的制作的VR数据,利用二次开发「交通接续」功能,驾驶员可在场景路网内无限循环驾驶。道路结构则财通中国具有代表性的典型横截面,根 据实地手机的路况信息进行了交通流车辆的忠实再现。
 |
 |
 |
 |

研究型汽车驾驶模拟器是一款定位于高校和科研机构开展自动驾驶仿真、交通安全和驾驶行为相关研究的专业产品。研究型汽车驾驶模拟器不仅提供逼真道路交通仿真场景、真实感驾驶模拟座舱,还提供更为精确的驾驶操纵传感器输出,以及满足研究所需的交通场景编辑系统、人车路环境测试云平台、驾驶员视线分析系统、驾驶员生理测量系统、驾驶员运动捕捉动作分析系统、驾驶行为分析系统等;具备定制和升级能力,能满足多种道路交通和驾驶行为相关研究的实际科研需求。
介绍 参数
技术支持:兴旺宝明通


